在之前的文章中,就记录过自己的网站从ftp转到了使用Nginx反向代理来解决家用宽带封禁80和443端口的问题,详见文章【增加Memos备忘录功能以及由frp穿透转为nginx反向代理】。没想到半年之后,我又要回归frp的怀抱了呀!
在Ubuntu 23.04运行 pip 命令(使用 sudo apt install python3-pip 安装)时,出现以下错误:
$ pip install --user <foobar>
error: externally-managed-environment
× This environment is externally managed
╰─> To install Python packages system-wide, try apt install
python3-xyz, where xyz is the package you are trying to
install.
If you wish to install a non-Debian-packaged Python package,
create a virtual environment using python3 -m venv path/to/venv.
Then use path/to/venv/bin/python and path/to/venv/bin/pip. Make
sure you have python3-full installed.
If you wish to install a non-Debian packaged Python application,
it may be easiest to use pipx install xyz, which will manage a
virtual environment for you. Make sure you have pipx installed.
See /usr/share/doc/python3.11/README.venv for more information.
note: If you believe this is a mistake, please contact your Python installation or OS distribution provider. You can override this, at the risk of breaking your Python installation or OS, by passing --break-system-packages.
hint: See PEP 668 for the detailed specification.如果想在用户范围( --user )而不是系统范围安装软件包怎么办呢?
可以参考这篇文章:3 Ways to Solve Pip Install Error on Ubuntu 23.04
简而言之,有三种方法可以解决这个问题。
之前给自己的博客添加了留言板功能,用的就是Valine来实现的。
本来以为自己的小破博客很少会有访客来留言,不过最近一段时间有几个人在留言板问了一些问题,自己总是不能及时的看到,后来想了想,看看能不能增加一个通知的功能呢,有人留言的时候我就能及时的回复了。
然后就在网上找到了如下的文章:
https://blog.csdn.net/AC916305619/article/details/105239277
这个文章已经写的很好啦,不过由于文章是2020年的,Leancloud有一些菜单的布局都变化了很多,所以部署的时候绕了不少弯子,所以我这里想着再重新整理一篇,也算是自己做个记录吧,如果能帮助到需要的朋友就更好啦!话不多说,下面就开始吧!
日前,发现之前一直使用的typora设置通过PicGO来实现sftp图床上传的功能不能用了,也不知道是什么原因,所以干脆直接卸载了重装。
然后下载了最新的PicGO版本为2.4.0-beta.6,结果发现SFTP的插件也更新了,最新的为:
https://github.com/imba97/picgo-plugin-sftp-uploader
后来在【插件设置】上搜索“sftp”,然后找到了该插件,下载了半天都下载不下来。后来想到它这个是从github上去下载的,还好【PicGO设置】里面可以配置代理,加速下载插件。
安装好插件之后,在配置插件的SFTP上传设置的时候,发现他的配置界面变了,不再是之前博客的文章中为typora设置sftp图床上传写的那样了,而是要通过一个json文件来配置,结果自己废了好半天才搞好。
平时使用示波器抓波形的时候,有时候会需要将示波器的波形保存下来,如果保存照片的话,经常是只能截取一小部分,而且局部细节也无法保留,分析起来非常麻烦。
示波器一般可以将波形保存为CVS格式的文件,这个文件可以使用表格打开,但是不如直接看图像比较形象直观。后来在网上了解到SPICE Explorer这个软件可以直接查看csv格式的文件,在这个软件里面可以缩放波形,查看波形的细节。
但是这个软件是要收费的,后来废了半天劲才找到了学习版,下面就分享给大家一起使用。
在嵌入式系统的开发中,现在大多数的文件系统的打包方式都是使用mkfs.ext4命令来将文件系统目录打包成ext4格式的img镜像,如果有时想要在现成的文件系统中直接增加一些东西的话,我们可以直接操作打包好的镜像来增删文件,而不需要再次重新编译来再使用SDK重新走一遍完整的打包镜像的过程。
一般需求
我们直接使用qemu工具即可,在Ubuntu开发环境中使用以下命令安装qemu工具
sudo apt-get install qemu-user-static首先可以先检查一下文件系统镜像是否是可以直接挂载的格式:
$ file ubuntu22.04_rootfs.img
ubuntu22.04_rootfs.img: Linux rev 1.0 ext4 filesystem data, UUID=57f8f4bc-abf4-655f-bf67-946fc0f9f25b (extents) (large files)这种就是raw ext4 image,即经常说的raw image。其特点是完整的ext4分区镜像(包含很多全零的无效填充区),可以直接使用mount进行挂载,因此比较大。
目前在Ubuntu22.04上解决奇怪的问题,查阅了一些资料,现在把这几天了解到的内容汇总记录一下,以免时间长了忘记。
基于NetworkManager的WiFi STA和AP操作命令:
日前在解决问题的时候,因为要排除某些因素,所以想要减少Linux系统中使用的CPU的核心,之前在LS1028平台,可以通过TEST_SEL_B和cfg_svr[0]直接更改其变成其他的型号,参见以下内容:
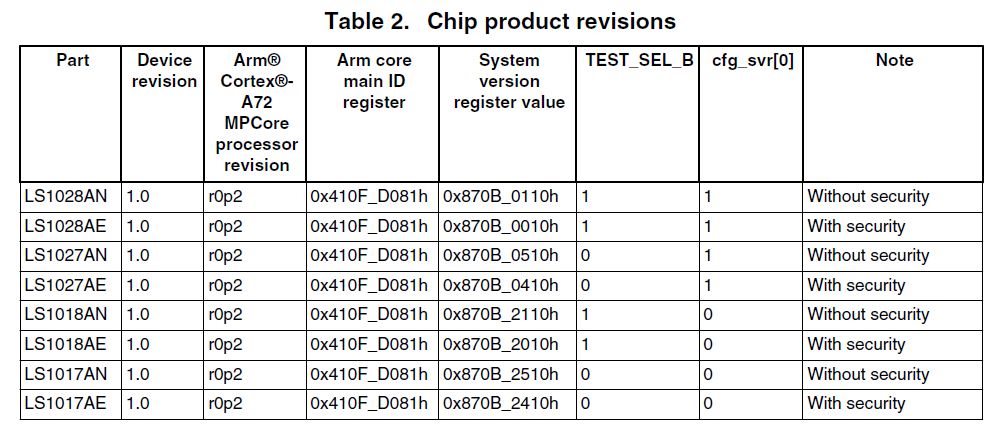

比如可以通过将cfg_svr[0]置低以变成LS1018,以实现将双核变成单核的效果。
背景
前段时间接到一个工作,是要在OK1028A-C的开发板上移植一下OpenWRT系统,在之前的OpenWRT版本是,原本是不支持LS1028的SOC的,不过在最新的版本上增加了支持。
其实LSxx系列的开发板,像是LS1012,1043,1046很早之前就支持了OpenWRT系统,不过的处理方式也简单很多,使用OpenWRT源码编译完成之后,只要它编译出来的内核设备树以及文件系统,像是U-boot以及引导方面的固件还是使用发布资料中的LSDK的镜像来实现。关于这部分的内容,博客中之前的博文也有很多提到了,可以参考了解一下:https://resona.top/tags/OpenWRT/
原本这次的工作也是按照这个方法来做的,这样的实现起来简单很多。但是资料交付给客户之后,客户说他必须需要OpenWRT系统中的使用网页界面升级的功能,这一下就难搞很多了呀。
这样就必须要按照OpenWRT的原生镜像的格式来制作,烧写到板子上的系统的结构也需要和OpenWRT的原生的结构保持一致才行。