我目前手边上有一个7.4v的锂电池,因为不常用,又怕总是搁置着会慢慢给放坏,所以网上查了一下7.4v锂电池的充电注意事项,特此记录一下。
7.4V一般是2串锂电的电池组,这也可以从电池的充电接口看到,一般是一个3p的接口,如果用万用表去测量的话,分别为0v,一串电池的电压,两串电池的电压。
单串电池的充放电范围是4.2V-2.7V,也就是说,如果电池电压一致性比较好的话,充电的满电电压是8.4V,放电的最低电压是5.4V。
如果没有保护板的话在5.4V以下也许用电器还能工作,但电池已经不能再用了,会损失寿命,需要充电再用。
另外锂电池对电压上下限很敏感,经常超高或超低会极大地损失循环寿命。
也就是对于7.4v的锂电池来说
| 满电 |
标称 |
停止 |
终止 |
| 8.4v |
7.4v |
7.0v |
6.0v |
在内核驱动文件./drivers/power/supply/da9052-battery.c中,有以下内容
{
{4102, 100}, {4065, 98},
{4048, 96}, {4034, 95},
{4021, 93}, {4011, 92},
{4001, 90}, {3986, 88},
{3968, 87}, {3952, 85},
{3938, 84}, {3926, 82},
{3916, 81}, {3908, 79},
{3900, 77}, {3892, 76},
{3883, 74}, {3874, 73},
{3864, 71}, {3855, 70},
{3846, 68}, {3836, 67},
{3827, 65}, {3819, 64},
{3810, 62}, {3801, 61},
{3793, 59}, {3786, 58},
{3778, 56}, {3772, 55},
{3765, 53}, {3759, 52},
{3754, 50}, {3748, 49},
{3743, 47}, {3738, 46},
{3733, 44}, {3728, 43},
{3724, 41}, {3720, 40},
{3716, 38}, {3712, 37},
{3709, 35}, {3706, 34},
{3703, 33}, {3701, 31},
{3698, 30}, {3696, 28},
{3693, 27}, {3690, 25},
{3687, 24}, {3683, 22},
{3680, 21}, {3675, 19},
{3671, 18}, {3666, 17},
{3660, 15}, {3654, 14},
{3647, 12}, {3639, 11},
{3630, 9}, {3621, 8},
{3613, 6}, {3606, 5},
{3597, 4}, {3582, 2},
{3546, 1}, {2747, 0}
},
由上可以看到,当单串电池电压到3.5v时,电池电量已经接近于0了,所以平时在放电的时候,要注意电池组电压不要低于7v
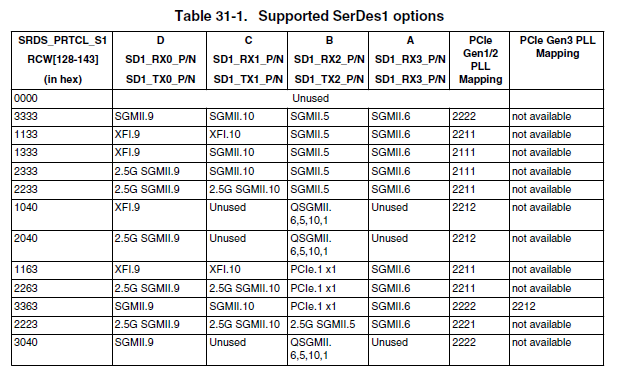
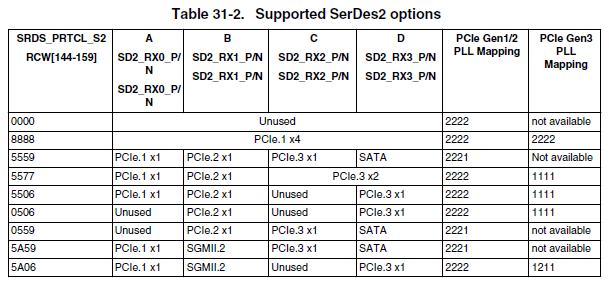 但是这个被称为RCW的配置方法还有很多客户还不是很了解,所以本文以一个LS1046A的实际需求为例,来详细说明一下修改的过程以供客户后续定制参考。
但是这个被称为RCW的配置方法还有很多客户还不是很了解,所以本文以一个LS1046A的实际需求为例,来详细说明一下修改的过程以供客户后续定制参考。